What is the OTUk_TT_Sk Atomic Function?
We formally call the OTUk_TT_Sk Atomic Function the OTUk Trail Termination Sink function.
Introduction
The OTUk_TT_Sk function is any circuit that accepts an OTUk data stream from the upstream OTSi/OTUk_A_Sk function (for OTU1 and OTU2 applications) or the upstream OTSiG/OTUk_A_Sk function (for OTU3 or OTU4 applications) and extracts and processes the data within the OTUk Section Monitoring Overhead (OTUk-SMOH) from the incoming OTUk signal.
The OTUk_TT_Sk function will evaluate this data to check for various defects and errors.
NOTE: I offer an extensive discussion of the OTUk_TT_Sk Atomic Function within Lesson 9 of THE BEST DARN OTN TRAINING PRESENTATION….PERIOD!!!
So What Does this Atomic Function Do?
If you recall, from our discussion of the OTUk/ODUk_A_So and OTUk_TT_So functions, those two particular functions will take an ODUk signal and work together to create an OTUk data stream with some newly computed OTUk-SMOH.
The OTUk_TT_So function will then route this OTUk data stream to the OTSi/OTUk-a_A_So (for OTU1/2 applications) or the OTSiG/OTUk-a_A_So functions (for OTU3/4 applications).
These functions will condition the OTUk signal for transport. Next, one of these functions will route this OTUk signal through other circuitry that will convert this OTUk data stream into the optical format and transport this data stream over optical fiber.
A receiving Network Element will receive this optical signal and convert this data back into the electrical format. This electrical signal will pass through the OTSi/OTUk-a_A_Sk atomic function (for OTU1/2 applications) or the OTSiG/OTUk-a_A_Sk atomic function (for OTU3/4 applications) before it finally reaches the OTUk_TT_Sk function.
I illustrate where the OTUk_TT_Sk function “fits in the big picture” below in Figure 1.
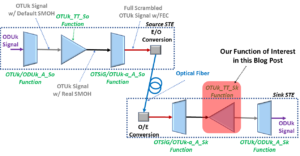
Figure 1, Illustration of Unidirectional Connection between a Source STE and a Sink STE with the OTUk_TT_Sk function highlighted.
Once this OTUk data arrives at the OTUk_TT_Sk function, it will perform the following tasks on this data stream.
Extracts and Processes the OTUk-SMOH within the incoming OTUk Data-Stream
The OTUk_TT_Sk function will accept this OTUk data stream and extract and process the OTUk-SMOH data from the incoming OTUk signal. The OTUk_TT_Sk function will evaluate this data to check for various defects and errors.
In other words, the OTUk_TT_Sk function will evaluate the OTUk_SMOH (the OTUk_TT_So function, at the remote STE) created. The OTUk_TT_Sk function will evaluate the OTUk-SMOH to check and see if it should declare certain types of defect conditions or if certain kinds of errors have occurred within this OTUk signal during transmission over optical fiber, as we describe below.
Clueless about OTN? We Can Help!!! Click on the Banner Below to Learn More!!!
Corporate Discounts Available!!

Detect and Flag Defects and Errors within the Incoming OTUk Data-Stream
More specifically, the OTUk_TT_So function will check the following defect conditions for (and declare or clear).
NOTE: (*) – Indicates that you need to be a member of THE BEST DARN OTN TRAINING PRESENTATION…PERIOD!!! to access this link.
Additionally, the OTUk_TT_Sk function will also detect and flag the following errors (within this OTUk data stream):
Some Details about the OTUk_TT_Sk Function
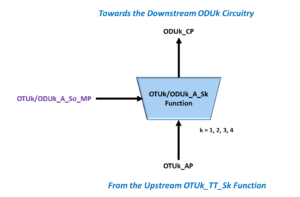
Figure 2 presents a simple illustration of the OTUk_TT_Sk function.
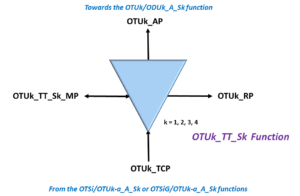
Figure 2, Simple Illustration of the OTUk_TT_Sk Atomic Function
The Interfaces within the OTUk_TT_Sk Atomic Function
Figure 2 shows that this function consists of four different interfaces.
- OTUk_TCP – The OTUk Termination Connection Point: This is where the function user supplies data (which most likely came from an upstream OTSi/OTUk-a_A_Sk or OTSiG/OTUk-a_A_Sk function) to the OTUk_TT_Sk function. This data will typically consist of the entire OTUk data stream (without the FEC, which was already decoded by the upstream OTSi/OTUk-a_A_Sk or OTSiG/OTUk-a_A_Sk function).
- OTUk_AP – The OTUk Access Point: This is where the function outputs OTUk data, clock, frame, and multi-frame signals (of the incoming OTUk data-stream) to downstream circuitry (towards the OTUk/ODUk_A_Sk function).
- OTUk_TT_Sk_MP – The Function Management Point: This interface permits the function-user to exercise control and monitor the activity within the OTUk_TT_Sk function. Some information the user can obtain from the Management Point includes Performance Monitoring and Correlated Defect Identification.
- OTUk_TT_RP – The Function Remote Point: This interface permits the function-user to output some information to a collocated OTUk_TT_So function. This information includes the BDI, BEI, and BIAE indicators. The collocated OTUk_TT_So function will respond to this signaling (from the OTUk_TT_Sk function – via the RP port) by transmitting the BEI values, BDI, and BIAE indicators back out to the Remote STE, as appropriate.
A Closer Look at the Interfaces within the OTUk_TT_Sk Function.
We will now take a closer look at these interfaces below.
The OTUk_TCP (Termination Connection Point) Interface
The OTUk_TT_Sk function accepts an OTUk data stream from either the upstream OTSi/OTUk-a_A_Sk or OTSiG/OTUk-a_A_Sk function via the OTUk_TCP Interface.
The data that either the OTSi/OTUk-a_A_Sk or the OTSiG/OTUk-a_A_Sk function outputs are a full-blown OTUk frame (that has been descrambled) by those functions.
Figure 3 presents a functional block of the OTUk_TT_Sk function.

Figure 3, Functional Block Diagram of the OTUk_TT_Sk Function
Finally, Figure 3 shows that the equipment that we connect to the OTUk_TCP (of the OTUk_TT_Sk function) will supply the following signals to this function.
The OTUk_TT_Sk function will perform the following operations on each OTUk frame within this signal.
- OTUk-SMOH (Section Monitoring Overhead) Extraction
- Compute and Verify the BIP-8 Value
- Receive and Process TTI (Trail-Trace Identifier) Messages
- Declares and clears the following defects (as appropriate)
- dIAE – Will also be forward to the RI_BIAE output in the form of the BIAE indicator.
- dTIM – Will be reported via the RI_BDI output by way of the BDI signal and will also be notified via the AI_TSF output.
- dDEG – will also be reported via the AI_TSD output
- dBDI
- dBIAE
The OTUk_TT_Sk_MP (Management Point) Interface
As the OTUk_TT_Sk function performs all of the above actions on the data (that it receives via the OTUk_TCP Interface), it will tally and report all of the following performance monitoring parameters to System Management (via the Management Interface).
- Report and Tally the following errors
- BIP-8 Errors– reported as nBIPV (to the RI_REI output) and as nN_B in performance monitoring.
- BEI Count – reported as nF_B in Performance Monitoring
- To provide Performance Monitoring reports on the following parameters to System Management
Has Inflation got You Down? Our Price Discounts Can Help You Fight Inflation and Can Help You Become an Expert on OTN!! Click Below to Learn More!!
Discounts Available for a Short Time!!!
The OTUk_TT_Sk_RP (Remote Point) Interface
The OTUk_TT_Sk_RP Interface contains three (3) output ports that the System Designer should connect to the collocated OTUk_TT_So Atomic Function.
Whenever the user connects these three (3) output pins to similarly named pins at the collocated OTUk_TT_So function, these two functions will work together to transmit backward alarm and error information to the remote STE (the source of the OTUk data-stream that this OTUk_TT_Sk function is receiving).
Please click on the appropriate links to learn more about these backward (or far-end) indicators and how the OTUk_TT_Sk function accomplishes these forms of signaling with its collocated OTUk_TT_So function.
The OTUk_AP (Access Point) Interface (Output)
The OTUk_TT_Sk function will output the following signals via the OTUk_AP Interface.
- AI_D – OTUk Adapted Information – Data Output
- AI_CK – OTUk Adapted Information – Clock Output
- AI_FS – OTUk Adapted Information – Frame Start Output
- AI_MFS – OTUk Adapted Information – Multi-Frame Start Output
- AI_TSF – OTUk Adapted Information – Trail Signal Fail (TSF) Indicator Output
- AI_TSD – OTUk Adapted Information – Trail Signal Degrade (TSD) Indicator Output.
In most cases, the System Designer would route these output signals to the downstream OTUk/ODUk_A_Sk function for further processing.
AI_D, AI_CK, AI_FS, and AI_MFS will contain the remaining OTUk data-stream, clock, frame-start, and multi-frame start indicators for the OTUk/ODUk_A_Sk function.
Defect Notification – Downstream
The OTUk_TT_Sk function will assert the AI_TSF output pin anytime it declares a service-affecting defect (dTIM) itself or if the upstream circuitry (e.g., the OTSiG/OTUk-a_A_Sk or the OTSi/OTUk-a_A_Sk functions) are declaring service-affecting defects and asserting the CI_SSF input to this function.
Likewise, the OTUk_TT_Sk function will assert the AI_TSD output pin anytime it declares the dDEG (Signal Degrade) defect condition.
Consequent Actions
Consequent Action Equations specify what actions an Atomic Function should take any time (and for the duration) that it declares a certain defect. ITU-T G.798 presents the following equations for consequent actions within the OTUk_TT_Sk function.
- aTSF <- CI_SSF or [dTIM and (NOT TIMActDis)]
- aBDI <- CI_SSF or dTIM
- aBEI <- nBIPV
- aBIAE <- dIAE
- aTSD <- dDEG
I will discuss each of these consequent action equations below.
aTSF <- CI_SSF or [dTIM and (NOT TIMActDis)]
Where:
aTSF is the Trail Signal Fail parameter that the OTUk_TT_Sk function will set LOW or HIGH to send current defect-state information towards downstream circuitry.
If aTSF = TRUE, then the OTUk_TT_Sk function will set its AI_TSF output HIGH. Conversely, if aTSF = FALSE, then the OTUk_TT_Sk function will set its AI_TSF output to LOW.
CI_SSF is the current state of the CI_SSF (Server Signal Fail Indicator) input from the upstream OTSi/OTUk_A_Sk or OTSiG/OTUk_A_Sk atomic functions. The OTSi/OTUk_A_Sk or OTSiG/OTUk_A_Sk function will assert this signal anytime it declares a service-affecting defect.
dTIM is the current state of the dTIM defect condition.
TIMActDis is a parameter the user can set to configure the dTIM to (optionally) drive the aTSF parameter.
This equation means that the OTUk_TT_Sk function will assert an internal signal (we call aTSF) if either of the following conditions is true.
- The upstream circuitry (e.g., the OTSiG/OTUk-a_A_Sk or the OTSi/OTUk-a_A_Sk function) is asserting the CI_SSF input to this function, or
- The OTUk_TT_Sk function declares the dTIM defect condition.
NOTES:
- If the OTUk_TT_Sk function asserts the aTSF signal, it will indicate so by asserting the AI_TSF output pin towards downstream circuitry (e.g., the OTUk/ODUk_A_Sk function).
- The AI_TSF output signal is a crucial signal for Automatic Protection Switching purposes.
- Please see the OTSi/OTUk_A_Sk or OTSiG/OTUk_A_Sk posts for information on what causes these two functions to drive the CI_SSF signal HIGH.
aBDI <- CI_SSF or dTIM
This equation means that the OTUk_TT_Sk function will assert another internal signal (the aBDI signal) if either of the following conditions is true.
- The upstream circuitry (e.g., the OTSiG/OTUk-a_A_Sk or the OTSi/OTUk-a_A_Sk function) is asserting the CI_SSF input to this function, or
- The OTUk_TT_Sk function declares the dTIM defect condition.
NOTES:
- If the OTUk_TT_Sk function asserts the aBDI signal, it will indicate so by asserting the RI_BDI output pin (via the Remote Point Interface). This signaling will command the collocated OTUk_TT_So function to set its BDI bit-field to TRUE within its next outbound OTUk frame.
- The OTUk_TT_Sk function will assert the RI_BDI and AI_TSF output pins under the same conditions.
- Please see the OTSi/OTUk_A_Sk or OTSiG/OTUk_A_Sk posts for information on what causes these two functions to drive the CI_SSF signal HIGH.
aBEI <- nBIPV
This equation means that the OTUk_TT_Sk function will automatically set the internal signal aBEI to the total number of BIP-8 errors detected within a given OTUk frame. This means the OTUk_TT_Sk function can set aBEI to a value between 0 and 8 within each OTUk frame.
NOTE: If the OTUk_TT_Sk function sets aBEI to a particular value, it will set the RI_BEI output pin (via the Remote Point Interface) to this same value. This signaling will command the collocated OTUk_TT_So function to set its BEI nibble-field to this same value (aBEI), within its next outbound OTUk frame, provided that RI_BIAE is set FALSE.
aBIAE <- dIAE
This equation means that the OTUk_TT_Sk function will assert the internal signal, aBIAE, if it declares the dIAE (Input Alignment Error) defect condition.
NOTES:
- If the OTUk_TT_Sk function is asserting the aBIAE signal, it will indicate so by asserting the RI_BIAE output pin (via the Remote Point Interface). This signaling will command the collocated OTUk_TT_So function to set the BEI/BIAE nibble-field to reflect the BIAE condition within its next outbound OTUk frame.
- The OTUk_TT_Sk function will NOT assert the AI_TSF or RI_BDI output signals because it declares the dIAE defect condition.
aTSD <- dDEG
This equation means that the OTUk_TT_Sk function will assert the internal signal aTSD anytime it declares the OTUk-dDEG (Signal Degrade) defect condition.
NOTES:
- If the OTUk_TT_Sk function is asserting the aTSD condition, it will indicate so by asserting the AI_TSD output signal towards the downstream circuitry (e.g., the OTUk/ODUk_A_Sk function in this case).
- The OTUk_TT_Sk function will NOT assert the RI_BDI output signal because it declares the dDEG defect condition.
The AI_TSD output signal is an essential signal for Automatic Protection Switching purposes.
The OTUk_TT_Sk Function Pin Description
Table 1 presents a Description of each of the Input and Output pins of the OTUk_TT_Sk function.
Table 1, Pin Description of the OTUk_TT_Sk Atomic Function
| Signal Name | Type | Description |
| OTUk_TCP Interface | | |
| CI_D | Input | OTUk Characteristic Information - Data Input:
The OTUk_TT_Sk function will accept this data from either the upstream OTSi/OTUk-a_A_Sk or OTSiG/OTUk-a_A_Sk function via this input pin. The OTUk_TT_Sk function will then perform the following actions on this data.
- It will extract out and process the SMOH (Section Monitoring Overhead) and
-- Compute and Verify the BIP-8 data and it will detect and flag any BIP-8 errors within each OTUk frame.
-- It will extract out the Section Monitoring Byte and check the state of the BDI and IAE bit-fields.
-- It will read in the value of the BEI/BIAE nibble field and check for the BIAE indicator.
-- It will also read in and tally all non-zero (and non-BIAE) BEI values and BIP-8 errors.
-- It will extract out the TTI message and compare this read-out value with that of the expected TTI Message.
As the OTUk_TT_Sk performs all of these tasks it will declare or clear the following defect conditions (as warranted).
- dBDI
- dTIM
- dIAE
- dBIAE
- dDEG
It will tally the following events for Performance Monitoring purposes.
- pIAE - Number of seconds in which the OTUk_TT_Sk function declared the dIAE defect.
- pN_BIAE - Number of seconds in which the OTUk_TT_Sk function declared the dBIAE defect.
- pN_EBC - Number of Near-End Errored Block Counts (BIP-8 Errors).
- pN_DS - Number of Defect Seconds (seconds in which the OTUk_TT_Sk (or upstream circuitry) declared certain near-end defect conditions.
- pF_EBC - Number of Far-End Errored Block Counts (BEI Count)
- pF_DS - Number of Far-End Defect Seconds (seconds in which the OTUk_TT_Sk function is declaring the dBDI defect condition).
The OTUk_TT_Sk function will sample this data on one of the edges of the CI_CK input clock signal. |
| CI_CK | Input | OTUk Characteristic Information - Clock Input:
The OTUk_TCP Interface will use this clock input signal to sample all of the following input signals.
- CI_D
- CI_FS
- CI_MFS
- CI_SSF
This clock signal also functions as the timing source of the OTUk_TT_Sk function. |
| CI_FS | Input | OTUk Characteristic Information - Frame Start Input:
The upstream circuitry should drive this input signal HIGH whenever it is applying the very first bit/byte of a new OTUk frame to the CI_D input.
The upstream circuitry should drive this input signal HIGH once for each incoming OTUk frame. |
| CI_MFS | Input | OTUk Characteristic Information - Multi-Frame Start Input:
The upstream circuitry should drive this input signal HIGH whenever it is applying the very frist bit/byte of a new OTUk superframe to the CI_D input.
The upstream circuitry should drive this input signal HIGH once for each incoming OTUk superframe (or once every 256 OTUk frames). |
| CI_SSF | Input | OTUk Characteristic Information - Server Signal Failure Indicator Input:
This input pin indicates whether or not the upstream circuitry is declaring a service-affecting defect with the OTUk data-stream (that it is applying to the CI_D input). These service-affecting defects include:
- dLOF
- dLOM
- dAIS (for OTU1 or OTU2 applications only).
This signal is functionally equivalent to the AIS indicator.
LOW - Indicates that the upstream circuitry is NOT declaring a service-affecting defect with the OTUk signal (being applied to the CI_D input).
HIGH - Indicates that the upstream circuitry IS declaring a service-affecting defect with the OTUk signal (being applied to the CI_D input). |
| OTUk_AP Interface | | |
| AI_D | Output | OTUk Adapted Information - Data Output:
The OTUk_TT_Sk function will output the OTUk data, after it has passed through and been processed by this function. This data will typicallly be routed to the OTUk/ODUk_A_Sk function for further processing.
This data will be updated (and output) synchronously with the AI_CK clock output signal. |
| AI_CK | Output | OTUk Adapted Information - Clock Output:
The OTUk_TT_Sk function will update/output signals via the OTUk_AP Interface on one of the edges of this clock output signal.
- AI_D
- AI_FS
- AI_MFS
- AI_TSF
- AI_TSD |
| AI_FS | Output | OTUk Adapted Information - Frame Start Output:
The OTUk_AP Interface will drive this output signal HIGH whenever it is also driving the very first bit/byte of a new OTUk frame via this AI_D output.
The OTUk_AP Interface will drive this output HIGH once for each outbound OTUk frame. |
| AI_MFS | Output | OTUk Adapted Information - Multiframe Start Output:
The OTUk_AP Interface will drive this output signal HIGH whenever it is also driving the very first bit/byte of a new OTUk superframe via the AI_D output.
The OTUk_AP Interface will drive this output HIGH once for each oubound OTUk superframe. |
| AI_TSF | Output | OTUk Adapted Information - Trail Signal Fail Output Indicator Output:
The OTUk_TT_Sk function will indicate whether or not it is declaring the Trail-Signal Fail (TSF) condition. The OTUk_TT_Sk function will declare the TSF condition, if it also declares any of the following defect conditions.
- dTIM
- SSF (if the CI_SSF input was driven HIGH due to any of the following defects within the upstream circuitry).
-- dLOF
-- dLOM
-- dAIS (OTU1/OTU2 applications only).
LOW - Indicates that the OTUk_TT_Sk function is NOT currently declaring the TSF indicator.
HIGH- Indicates that the OTUk_TT_Sk function is currently declaring the TSF indicator. |
| AI_TSD | Output | OTUk Adapted Information - Trail Signal Declared Indicator Output:
The OTUk_TT_Sk function will use this output signal to indicate if it is declaring the Trail-Signal Defect (TSD) Condition. The OTUk_TT_Sk function will declare the TSD condition if it also declares the dDEG (Signal Degrade) defect condition.
LOW - Indicates that the OTUk_TT_Sk function is NOT currently declaring the TSD indicator.
HIGH - Indicates that the OTUk_TT_Sk function is currently declaring the TSD indicator. |
| OTUk_RP Interface | | |
| RI_BEI | Output | OTUk Remote Point Information - Backward Error Indicator:
As the OTUk_TT_Sk function computes and verifies the BIP-8 values (within the OTUk signal that it is receiving via the CI_D input), it will output date through this output to reflect the number of BIP-8 errors that it is declaring within each incoming OTUk frame. This output signal will be connected to the RP input of its collocated OTUk_TT_So function.
If the OTUk_TT_Sk detects ZERO BIP-8 errors within the most recently received OTUk frame, then it will set RI_BEI = 0 for that OTUk frame period.
Likewise, if the OTUk_TT_Sk function detects five (5) BIP-8 errors within the most recenlty received OTUk frame, then it will set RI_BEI = 5 for that OTUk frame period. |
| RI_BIAE | Output | OTUk Remote Point Information - Backward Input Alignment Error Indicator:
If the OTUk_TT_Sk function declares the dIAE defect condition, then it will set the RI_BIAE indicator true. This output signal will be connected to the corresponding RP Input of the collocated OTUk_TT_So function.
The collocated OTUk_TT_So function is expected to overwrite the BEI nibble-field (within the next outbound OTUk frame).
Please see the OTUk_TT_So function post for more details on this topic). |
| RI_BDI | Output | OTUk Remote Point Information - Backward Defect Indicator:
If the OTUk_TT_Sk function declares any of the following defect conditions, then it will set this output pin TRUE.
- dTIM
- CI_SSF
The user should connect this output signal to the RI_BDI input of the collocated OTUk_TT_So function.
The collocated OTUk_TT_So function is expected to set the BDI bit-field (within the Section Monitoring byte of the SMOH) to "1" within the next outbound OTUk frame, if this output pin is TRUE.
Otherwise, the OTUk_TT_So function should set the BDI bit-field to "0" within the very next outbound OTUk frame. |
| OTUk_TT_So_MP Interface | | |
| MI_AcTI | Output | Management Interface - Accepted Trail Trace identifier Message Output:
The OTUk_TT_Sk function will output the contents of the Accepted Trail Trace Identifier Message via this output signal.
The OTUk_TT_Sk function will output the accepted TTI Message via this output, whenever the user issues a command requesting this data via the MI_GetAcTI input. |
| MI_ExSAPI | Input | Management Interface - Expected SAPI (Source Access Point Identifier) Input:
The OTUk_TT_Sk function will compare the SAPI-portion of the "Accepted Trail-Trace Identification" Message (that it receives from the SMOH (within the OTUk signal) with that which the user supplies to this input.
If the two values do not match, then the OTUk_TT_Sk function will declare the dTIM defect condition. |
| MI_ExDAPI | Input | Management Interface - Expected DAPI (Destination Access Point Identifier) Input:
The function user is expected to apply the Expected Value of the DAPI portion of the Trail-Trace Identification Message.
The OTUk_TT_Sk function will compare the DAPI portion of the "Accepted Trail-Trace Identification" Message (that it received from the SMOH (within the OTUk signal) with that which the user supplies to this input.
If the two values do not match, then the OTUk_TT_Sk function will declare the dTIM defect condition. |
| MI_GetAcTI | Input | Mangement Interface - Get Accepted Message Command Input:
This input permits the user to request that the OTUk_TT_Sk function provide the user with the currently "accepted" TTI Message. Whenever the user invokes this command, the OTUk_TT_Sk function will output the contents of the currently "accepted" TTI Message via the MI_ActTI output. |
| MI_TIMDetMo | Input | Management Interface - TIM (Trace Identifier Mismatch) Detection Mode:
This input permits the user to specify which portion of the TTI Message that the OTUk_TT_Sk function should check and verify when checking for the dTIM defect condition. Please see the dTIM blog post for more details. |
| MI_cTIM | Output | Management Interface - Correlated TIM (Trail-Trace Identifier Mismatch) Defect:
This output signal indicates if the OTUk_TT_Sk function is declaring the dTIM defect condition.
LOW - Indicates that the OTUk_TT_Sk function is NOT currently declaring the dTIM defect condition.
HIGH - Indicates that the OTUk_TT_Sk function is currently declaring the dTIM defect condition. |
| MI_cDEG | Output | Management Interface - Correlated DEG (Signal Degrade) Defect:
This output signal indicates if the OTUk_TT_Sk function is declaring the dDEG defect condition.
LOW - Indicates that the OTUk_TT_Sk function is NOT currently declaring the dDEG defect condition.
HIGH - Indicates that the OTUk_TT_Sk function is currently declaring the dDEG defect condition.
|
| MI_cBDI | Output | Management Interface - Correlated BDI (Backward Defect Indicator) Defect:
This output signal indicates if the OTUk_TT_Sk function is declaring the dBDI defect condition.
LOW - Indicates that the OTUk_TT_Sk function is NOT currently declaring the dBDI defect condition.
HIGH - Indicates that the OTUk_TT_Sk function is currently declaring the dBDI defect condition. |
| MI_cSSF | Output | Management Interface - Correlated SSF (Server Signal Fail) Defect:
This output signal indicates if the OTUk_TT_Sk function is declaring the SSF defect condition.
LOW - Indicates that the OTUk_TT_Sk function is NOT currently declaring the SSF defect condition. This also means that the upstream circuitry is currently drving the CI_SSF input pin LOW.
HIGH - Indicates that the OTUk_TT_Sk function is currently declaring the SSF defect condition. This also means that upstream circuitry is currently driving the CI_SSF input pin HIGH. |
| MI_pIAE | Output | Management Interface - IAE Performance Monitor Parameter:
The OTUk_TT_Sk function will drive this output pin HIGH, for one full second, if it has declared the dIAE defect for any portion of the previouis one-second period.
Conversely, the function will keep this output pin LOW, for one full second, if it has NEVER declared the dIAE defect, during the previous one-second period.
This one second period will be dictated by the 1-Second Clock signal that the user supplies to the MI_1Second input to this function. |
| MI_pBIAE | Output | Management Interface - BIAE Performance Monitor Parameter:
The OTUk_TT_Sk function will drive this output pin HIGH for one full second, if it has declared the dBIAE defect for any portion of the previous one second period.
Conversely, the function will keep tis output pin LOW for one full second, if it has NEVER declared the dBIAE defect, during the previous one second period.
This one second period will be dictated by the 1 Second Clock signal that the user supplies to the MI_1Second input to this function. |
| MI_pN_EBC | Output | Management Interface - Number of Near-End Errored Block Count (BIP-8 Errors) - One Second Performance Monitoring Parameter:
The OTUk_TT_Sk function will tally and report the total number of BIP-8 errors, that it has detected and flagged (within the incoming OTUk data-stream), during the previous 1 second period. |
| MI_pN_DS | Output | Management Interface - Near-End Defect - One Second Performance Monitoring Parameter:
The OTUk_TT_Sk fuinction will drive this output pin HIGH for one full second, if it has declared at least one of the following defects for any portion of the previous one-second period.
- CI_SSF or
- dTIM
Conversely, the function will keep this output pin LOW, for one-full second, if it has NEVER declared any of these defect during the previous one-second period.
This one-second period will be dictated by the 1 Second Clock signal that the user supplies to the MI_1Second input to this function. |
| MI_pF_EBC | Output | Management Interface - Number of Far-End Errored Block Count (BEI Errors) - One Second Performance Monitoring Parameter:
The OTUk_TT_Sk function will tally and report the total number of BEI counts that it has read and captured (within the incoming OTUk data-stream) during the previous one-second period. |
| MI_pF_DS | Output | Management Interface - Far-End Defect - One Second Performance Monitoring Parameter:
The OTUk_TT_Sk function will drive this output pin HIGH, for one full second, if it has declared the dBDI defect for any portion of the previous one-second period.
Conversely, this function will keep this output pin LOW, for one-full second, if it has NEVER declared the dBDI defect, during the previous one-second period. |
| MI_1Second | Input | Management Interface - One Second Clock Input:
The user is expected to supply a clock signal, which has a frequency of 1Hz, to this input.
The Performance Monitoring portino of the OTUk_TT_Sk function will use this clock signal as its timing reference for tallying and reporting the various one-second Performance Monitoring parameters. |
| MI_DEGThr | Input | Management Interface - The dDEG BIP-8 Error Threshold for a Bad One-Second Interval:
The user can specify the BIP-8 error threshold for which the OTUk_TT_Sk function should count a given one second period as a "Bad One-Second" period, for the sake of dDEG declaration.
If the OTUk_TT_Sk function detects DEGThr or more BIP-8 errors, during a one-second interval, then the OTUk_TT_Sk function will count that one-second interval as a "Bad" interval.
If the OTUk_TT_Sk function detects less than DEGThr BIP-8 errors, during a one-second interval, then the OTUk_TT_Sk function will NOT count that one-second as a "Bad" interval. |
| MI_DEGM | Input | Management Interface - Number of "Bad One-Second" Intervals for dDEG Declaration:
The user can specify the minimum number of consecutive "Bad One Second" intervals that the OTUk_TT_Sk function must detect before declaring the dDEG defect condition.
If the OTUk_TT_Sk function detects and flags DEGM consecutive "Bad One-Second" Intervals, then the OTUk_TT_Sk function will declare the dDEG defect condition.
NOTE: DEGThr defines the threshold for a "Bad One-Second" interval. |
| | |
Has Inflation got You Down? Our Price Discounts Can Help You Fight Inflation and Help You to Become an Expert on OTN!! Click on the Banner Below to Learn More!!
Discounts Available for a Short Time!!
For More Information on OTN Posts in this Blog, click on the Image below.

OTN Related Topics within this Blog General Topics Consequent Equations - What are they and How can you use them? ...